Embedded C is the most popular choice of language used for developing embedded systems because of its simplicity, efficiency, less time required for development, and its portability from one system to another. As we know that the embedded systems have constraints on hardware resources such as CPU, memory sizes, etc, it becomes very important to use the resources judiciously and responsibly. To achieve this, Embedded C usually can interact with the hardware resources with necessary abstractions. In this article, we will see the most commonly asked interview questions in Embedded C for both freshers and experienced developers.
A segmentation fault occurs most commonly and often leads to crashes in the programs. It occurs when a program instruction tries to access a memory address that is prohibited from getting accessed.
Create a free personalised study plan Create a FREE custom study plan Get into your dream companies with expert guidance Get into your dream companies with expert.. Real-Life Problems Prep for Target Roles Custom Plan Duration Flexible PlansA startup code is that piece of code that is called before the execution of the main function. This is used for creating a basic platform for the application and it is written in assembly language.
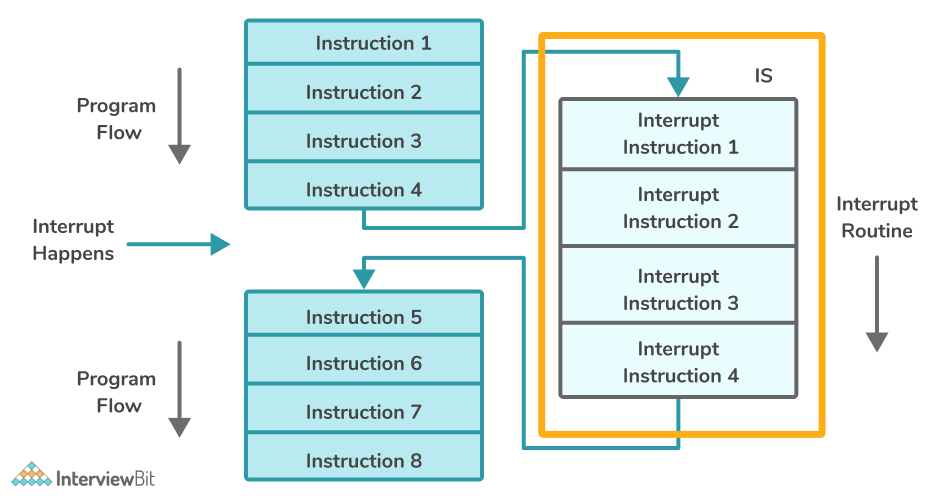
ISR expands to Interrupt Service Routines. These are the procedures stored at a particular memory location and are called when certain interrupts occur. Interrupt refers to the signal sent to the processor that indicates there is a high-priority event that requires immediate attention. The processor suspends the normal flow of the program, executes the instructions in ISR to cater for the high priority event. Post execution of the ISR, the normal flow of the program resumes. The following diagrams represent the flow of ISR.
You can download a PDF version of Embedded C Interview Questions. Download PDF Download PDFVoid pointers are those pointers that point to a variable of any type. It is a generic pointer as it is not dependent on any of the inbuilt or user-defined data types while referencing. During dereferencing of the pointer, we require the correct data type to which the data needs to be dereferenced. For Example:
int num1 = 20; //variable of int datatype void *ptr; //Void Pointer *ptr = &num1; //Point the pointer to int data print("%d",(*(int*)ptr)); //Dereferencing requires specific data type char c = 'a'; *ptr = &c; //Same void pointer can be used to point to data of different type -> reusability print("%c",(*(char*)ptr));Void pointers are used mainly because of their nature of re-usability. It is reusable because any type of data can be stored.
The volatile keyword is mainly used for preventing a compiler from optimizing a variable that might change its behaviour unexpectedly post the optimization. Consider a scenario where we have a variable where there is a possibility of its value getting updated by some event or a signal, then we need to tell the compiler not to optimize it and load that variable every time it is called. To inform the compiler, we use the keyword volatile at the time of variable declaration.
// Declaring volatile variable - SYNTAX // volatile datatype variable_name; volatile int x;| const | volatile |
|---|---|
| The keyword “const” is enforced by the compiler and tells it that no changes can be made to the value of that object/variable during program execution. | The keyword “volatile” tells the compiler to not perform any optimization on the variables and not to assume anything about the variables against which it is declared. |
| Example: const int x=20; , here if the program attempts to modify the value of x, then there would be a compiler error as there is const keyword assigned which makes the variable x non-modifiable. | Example: volatile int x; , here the compiler is told to not assume anything regarding the variable x and avoid performing optimizations on it. Every time the compiler encounters the variable, fetch it from the memory it is assigned to. |
The Concatenation operator is indicated by the usage of ## . It is used in macros to perform concatenation of the arguments in the macro. We need to keep note that only the arguments are concatenated, not the values of those arguments.
For example, if we have the following piece of code:
#define CUSTOM_MACRO(x, y) x##y main()< int xValue = 20; printf(“%d”, CUSTOM_MACRO(x, Value)); //Prints 20 >We can think of it like this if arguments x and y are passed, then the macro just returns xy -> The concatenation of x and y .
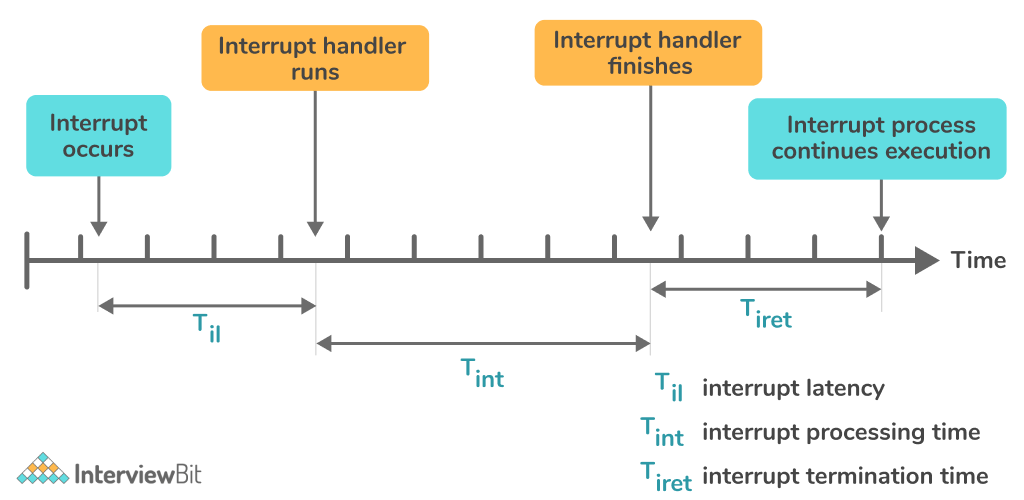
Start Your Coding Journey With Tracks Start Your Coding Journey With Tracks Master Data Structures and Algorithms with our Learning Tracks Master Data Structures and Algorithms Topic Buckets Mock Assessments Reading Material Earn a CertificateInterrupt latency refers to the time taken by ISR to respond to the interrupt. The lesser the latency faster is the response to the interrupt event.
We can achieve this by making use of the “extern” keyboard. It allows the variable to be accessible from one file to another. This can be handled more cleanly by creating a header file that just consists of extern variable declarations. This header file is then included in the source files which uses the extern variables. Consider an example where we have a header file named variables.h and a source file named sc_file.c .
/* variables.h*/ extern int global_variable_x;/* sc_file.c*/ #include "variables.h" /* Header variables included */ #include void demoFunction(void)
Embedded C is a programming language that is an extension of C programming. It uses the same syntax as C and it is called “embedded” because it is used widely in embedded systems. Embedded C supports I/O hardware operations and addressing, fixed-point arithmetic operations, memory/address space access, and various other features that are required to develop fool-proof embedded systems.
Following are the differences between traditional C language and Embedded C:
| C Language | Embedded C Language |
|---|---|
| It is of native development nature | It is used for cross-development purposes |
| C is independent of hardware and its underlying architecture | Embedded C is dependent on the hardware architecture. |
| C is mainly used for developing desktop applications. | Embedded C is used in embedded systems that have limited resources like ROM, RAM, etc. |
| Category | Macro Function | Inline Function |
|---|---|---|
| Compile-time expansion | Macro functions are expanded by the preprocessor at the compile time. | Inline functions are expanded by the compiler. |
| Argument Evaluation | Expressions passed to the Macro functions might get evaluated more than once. | Expressions passed to Inline functions get evaluated once. |
| Parameter Checking | Macro functions do not follow strict parameter data type checking. | Inline functions follow strict data type checking of the parameters. |
| Ease of debugging | Macro functions are hard to debug because it is replaced by the pre-processor as a textual representation which is not visible in the source code. | Easier to debug inline functions which is why it is recommended to be used over macro functions. |
| Example | #define SQUARENUM(A) A * A -> The macro functions are expanded at compile time. Hence, if we pass, the output will be evaluated to 3+2*3+2 which gets evaluated to 11. This might not be as per our expectations. | inline squareNum(int A) -> If we have printf(squareNum(3+2)); , the arguments to the function are evaluated first to 5 and passed to the function, which returns a square of 5 = 25. |
The const keyword is used when we want to ensure that the variable value should not be changed. However, the value can still be changed due to external interrupts or events. So, we can use const with volatile keywords and it won’t cause any problem.
Discover your path to a Discover your path to a Successful Tech Career for FREE! Successful Tech Career!
Answer 4 simple questions & get a career plan tailored for you Answer 4 simple questions & get a career plan tailored for you Interview Process CTC & Designation Projects on the Job Referral System 2 Lakh+ Roadmaps CreatedVariables defined with static are initialized once and persists until the end of the program and are local only to the block it is defined. A static variables declaration requires definition. It can be defined in a header file. But if we do so, a private copy of the variable of the header file will be present in each source file the header is included. This is not preferred and hence it is not recommended to use static variables in a header file.
The Pre-decrement operator ( --operand ) is used for decrementing the value of the variable by 1 before assigning the variable value.
#include < stdio.h >int main() < int x = 100, y; y = --x; //pre-decrememt operators -- first decrements the value and then it is assigned printf("y = %d\n", y); // Prints 99 printf("x = %d\n", x); // Prints 99 return 0; >The Post-decrement operator ( operand-- ) is used for decrementing the value of a variable by 1 after assigning the variable value.
#include < stdio.h >int main() < int x = 100, y; y = x--; //post-decrememt operators -- first assigns the value and then it is decremented printf("y = %d\n", y); // Prints 100 printf("x = %d\n", x); // Prints 99 return 0; >A function is called reentrant if the function can be interrupted in the middle of the execution and be safely called again (re-entered) to complete the execution. The interruption can be in the form of external events or signals or internal signals like call or jump. The reentrant function resumes at the point where the execution was left off and proceeds to completion.
It can be done by defining it as a constant character pointer. const protects it from modifications.
Following are the reasons for the segmentation fault to occur:
Some of the ways where we can avoid Segmentation fault are:
int varName; int *p = &varName;int x; scanf("%d",&x); In the same way, while sending the address of variables to custom-defined functions, we can use the & parameter instead of using pointer variables to access the address.
int x = 1; x = customFunction(&x);printf() is a non-reentrant and thread-safe function which is why it is not recommended to call inside the ISR.
An ISR by nature does not allow anything to pass nor does it return anything. This is because ISR is a routine called whenever hardware or software events occur and is not in control of the code.
Virtual memory is a means of allocating memory to the processes if there is a shortage of physical memory by using an automatic allocation of storage. The main advantage of using virtual memory is that it is possible to have larger virtual memory than physical memory. It can be implemented by using the technique of paging.
Paging works as follows:
int square (volatile int *p)
From the code given, it appears that the function intends to return the square of the values pointed by the pointer p. But, since we have the pointer point to a volatile integer, the compiler generates code as below:
int square ( volatile int *p)
Since the pointer can be changed to point to other locations, it might be possible that the values of the x and y would be different which might not even result in the square of the numbers. Hence, the correct way for achieving the square of the number is by coding as below:
long square (volatile int *p )
__interrupt double calculate_circle_area (double radius)
Following things are wrong with the given piece of code:
void demo(void) < unsigned int x = 10 ; int y = −40; if(x+y >10) < printf("Greater than 10"); >else < printf("Less than or equals 10"); >>In Embedded C, we need to know a fact that when expressions are having signed and unsigned operand types, then every operand will be promoted to an unsigned type. Herem the -40 will be promoted to unsigned type thereby making it a very large value when compared to 10. Hence, we will get the statement “Greater than 10” printed on the console.
Following are the various causes of Interrupt Latency:
Interrupt latency can be reduced by ensuring that the ISR routines are short. When a lower priority interrupt gets triggered while a higher priority interrupt is getting executed, then the lower priority interrupt would get delayed resulting in increased latency. In such cases, having smaller ISR routines for lower priority interrupts would help to reduce the delay.
Also, better scheduling and synchronization algorithms in the processor CPU would help minimize the ISR latency.
A pointer is said to be a wild pointer if it has not been initialized to NULL or a valid memory address. Consider the following declaration:
int *ptr; *ptr = 20;Here the pointer ptr is not initialized and in the next step, we are trying to assign a valid value to it. If the ptr has a garbage location address, then that would corrupt the upcoming instructions too.
If we are trying to de-allocate this pointer and free it as well using the free function, and again if we are not assigning the pointer as NULL or any valid address, then again chances are that the pointer would still be pointing to the garbage location and accessing from that would lead to errors. These pointers are called dangling pointers.
Both declarations specify for the files to be included in the current source file. The difference is in how and where the preprocessor looks for including the files. For #include ". " , the preprocessor just searches for the file in the current directory as where the source file is present and if not found, it proceeds to search in the standard directories specified by the compiler. Whereas for the #include <. >declaration, the preprocessor looks for the files in the compiler designated directories where the standard library files usually reside.
Memory leak is a phenomenon that occurs when the developers create objects or make use of memory to help memory and then forget to free the memory before the completion of the program. This results in reduced system performance due to the reduced memory availability and if this continues, at one point, the application can crash. These are serious issues for applications involving servers, daemons, etc that should ideally never terminate.
Example of Memory Leak:
#include void memLeakDemo() < int *p = (int *) malloc(sizeof(int)); /* Some set of statements */ return; /* Return from the function without freeing the pointer p*/ >In this example, we have created pointer p inside the function and we have not freed the pointer before the completion of the function. This causes pointer p to remain in the memory. Imagine 100s of pointers like these. The memory will be occupied unnecessarily and hence resulting in a memory leak.
We can avoid memory leaks by always freeing the objects and pointers when no longer required. The above example can be modified as:
#include ; void memLeakFix() < int *p = (int *) malloc(sizeof(int)); /* Some set of statements */ free(p); // Free method to free the memory allocated to the pointer p return; >Loops that involve count down to zero are better than count-up loops. This is because the compiler can optimize the comparison to zero at the time of loop termination. The processors need not have to load both the loop variable and the maximum value for comparison due to the optimization. Hence, count down to 0 loops are always better.
A null pointer is a pointer that does not point to any valid memory location. It is defined to ensure that the pointer should not be used to modify anything as it is invalid. If no address is assigned to the pointer, it is set to NULL .
Syntax:
data_type *pointer_name = NULL;One of the uses of the null pointer is that once the memory allocated to a pointer is freed up, we will be using NULL to assign to the pointer so that it does not point to any garbage locations.
1. const int x; 2. int const x; 3. const int *x; 4. int * const x; 5. int const * x const;This can be achieved by involving bit manipulation techniques - Shift left operator as shown below:
#include void main()
int num1=20, num2=30, temp; temp = num1; num1 = num2; num2 = temp;int num1=20, num2=30; num1=num1 + num2; num2=num1 - num2; num1=num1 - num2;int num1=20, num2=30; num1=num1 ^ num2; num2=num2 ^ num1; num1=num1 ^ num2;int num1=20, num2=30; num1^=num2^=num1^=num2;The order of evaluation here is right to left.
int num1=20, num2=30; num1 = (num1+num2)-(num2=num1);Here the order of evaluation is from left to right.
We can do this by using bitwise operators.
void main ()
void main ()
#define MIN(NUM1,NUM2) ( (NUM1) Useful Resource